
This post is a few pictures showing the modification of SG90 servos so that they rotate 360 degrees rarther than the standard 180 left/right.
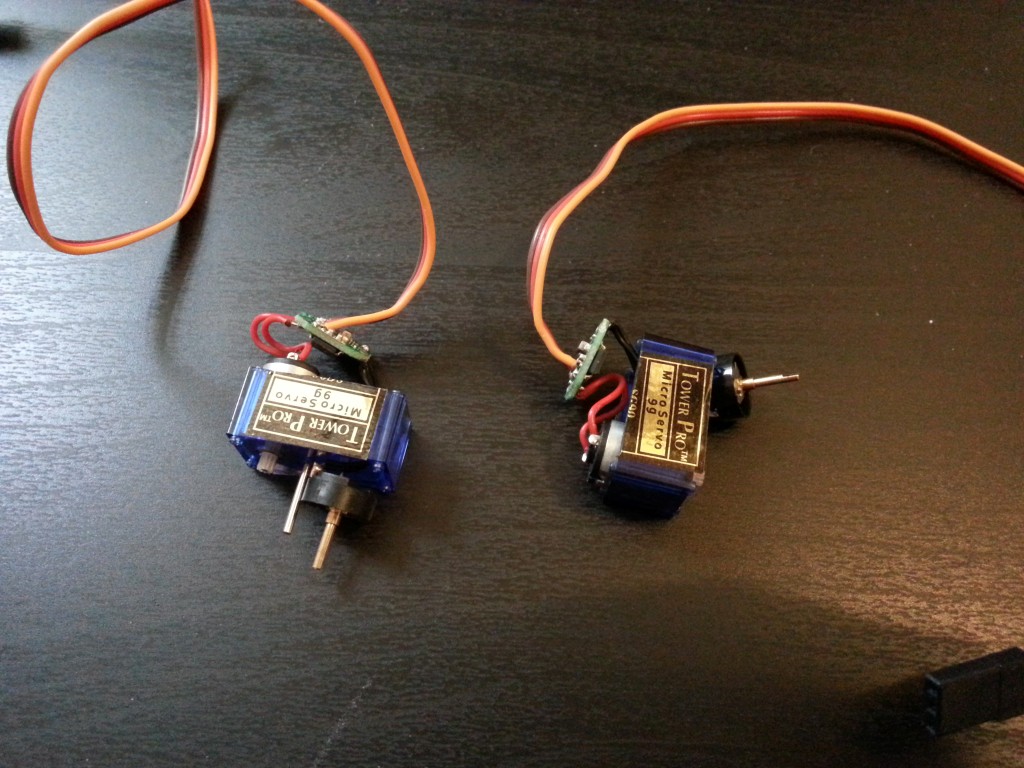
Bottom casing removed and you can see the control board, motor and potentiometer.

Here is the servo with the top half of casing removed. One of the gears has a pin that physically stops full 360 degree rotation so that must be cut off.

Small pile of gears and drive shafts.
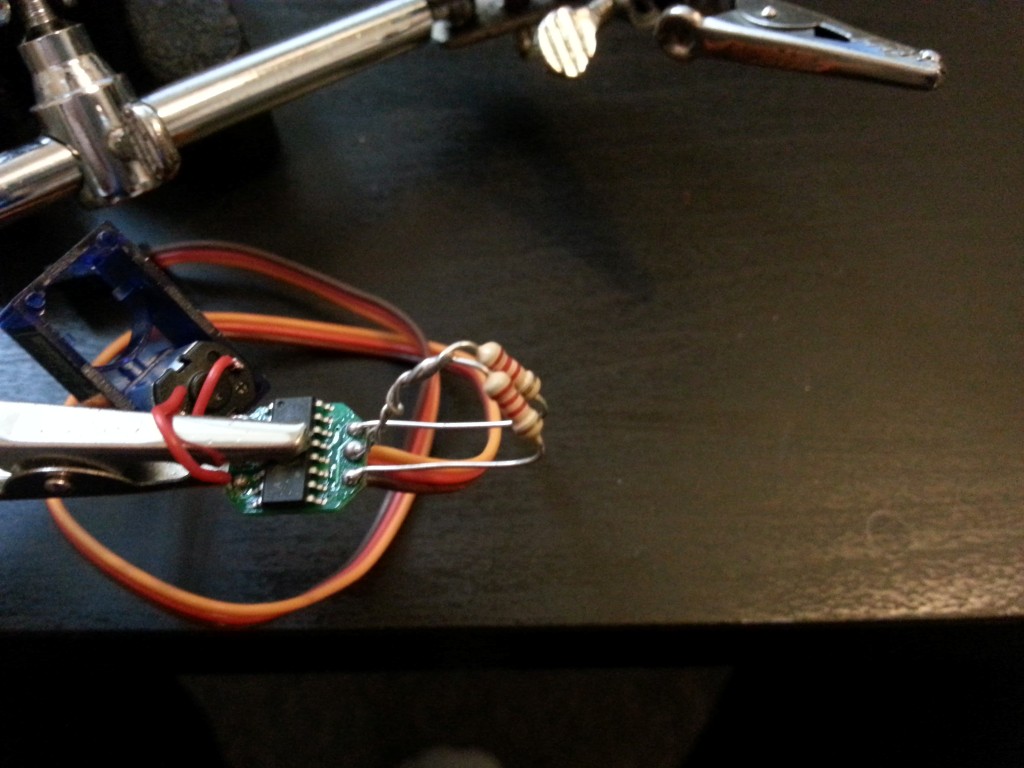
My first attempt at soldering a pair of resistors in place where the potentiometer previous connected to. This is to trick the control board into believing it has not rotated far enough yet.

2nd attempt on the other servo, space is very limited when you put the end casings back on so you really need to shorten the resistor legs as much as possible.
And back together ready to act as drive motors for my robot.